|











| |
|
運動參考單元(MRU)產品線於2004年首次發布,當時基於Inertial
Labs的MEMS傳感器解決方案開始在性能上與傳統FOG單元競爭。面向最終用戶的MRU產品線的輕鬆集成意味著無需額外成本即可獲得具有競爭力的性能。
工廠配置為使用Inertial Labs消息格式或Kongsberg / Seatex和Teledyne TSS
*數據格式輸出解析的數據,使用戶能夠輕鬆地用Inertial Labs產品線替換過時的MRU。 |
 |
|
Inertial
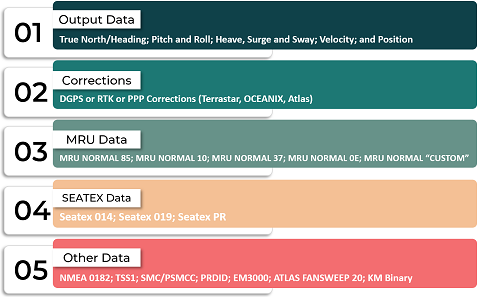
Labs開發了MRU,可滿足所有海洋和水文應用的要求。MRU是一種高性能的捷聯式運動傳感器,可確定安裝到其上的任何設備的俯仰和橫滾,升沈,喘振,搖擺,線性加速度,角速度,航向,速度和位置。
Inertial
Labs的技術工程師團隊可提供專業知識,以幫助用戶從可用模型中進行選擇和配置:MRU-B1,MRU-B1.1,MRU-B2,MRU-E,MRU-P和MRU-PD(提供海底模型)
)。我們的支持團隊將幫助為所有應用程序基礎設置單位,以滿足啟用GNSS的環境和GNSS拒絕的環境。 |
可用MRU型號
|
MODEL |
.png) |
 |
.png) |
.png) |
.png) |
.png) |
|
MRU-B1 |
MRU-B1.1 |
MRU-B2 |
MRU-E |
MRU-P |
MRU-PD |
|
輸出信號 |
Heave, Surge and Sway |
Pitch and Roll |
Heave, Surge, Sway, Pitch and Roll |
Heave, Surge, Sway, Heading, Pitch and Roll |
Heave, Surge, Sway, Heading, Pitch, Roll, Position and Velocity |
Heave, Surge, Sway, Dual Antenna Heading, Pitch, Roll, Position and
Velocity |
|
Heave Accuracy |
5% or 5 cm (RMS) |
- |
5% or 5 cm (RMS) |
5% or 5 cm (RMS) |
5% or 5 cm (RMS) |
5% or 5 cm (RMS) |
|
航向感測類型 |
External Magnetic Compass (optional) |
External Magnetic Compass (optional) |
External Magnetic Compass (optional) |
Embedded Fluxgate Magnetometer |
Embedded Fluxgate Magnetometer |
Dual Antenna GNSS |
|
俯仰和滾轉精度 |
- |
0.02 degrees (RMS) |
0.02 degrees (RMS) |
0.02 degrees (RMS) |
0.02 degrees (RMS) |
0.02 degrees (RMS) |
|
航向精度 |
- |
- |
- |
0.6 degrees (RMS) |
0.4 degrees (RMS) |
0.05 degrees (RMS) |
|
位置精度 |
- |
- |
- |
- |
40 cm (DGPS), 1 cm (RTK) |
40 cm (DGPS), 1 cm (RTK) |
|
尺寸 (mm) |
120 x 50 x 53 |
120 x 50 x 53 |
120 x 50 x 53 |
120 x 50 x 53 |
120 x 50 x 53 |
120 x 50 x 53 |
|
重量 (g) |
220 |
220 |
220 |
280 |
320 |
320 |
|
應用 |
海上裝卸碼頭、平台波浪補償 |
起重機旋轉補償;近海鑽井平台 |
測量船運動分析;海上煉油廠運動控制 |
船用天線指向;直升機停機坪穩定監測 |
Cargo Transfer Stabilization; DP-1/2/3 Buoys; Small Craft
Positioning |
船舶導航、自主測量船、動態定位系統 |
|
Model |
MRU-B1 |
MRU-B1.1 |
MRU-B2 |
MRU-E |
MRU-P |
MRU-PD |
水下密閉式型號
|
MODEL |
.png) |
 |
.png) |
 |
 |
|
MRU-B1S |
MRU-B1.1S |
MRU-B2S |
MRU-PDS |
WS-PDS |
|
輸出信號 |
Heave, Surge and Sway |
Pitch and Roll |
Heave, Surge, Sway, Pitch and Roll |
Heave, Surge, Sway, Dual Antenna Heading, Pitch, Roll, Position and
Velocity |
Wave Energy, Spectral Data, Fourier Coefficients, Attitude, Position
and Velocity |
|
起伏精度 |
5% or 5 cm (RMS) |
- |
5% or 5 cm (RMS) |
5% or 5 cm (RMS) |
- |
|
Depth Rating |
1000 meters |
1000 meters |
1000 meters |
- |
- |
|
航向感測類型 |
External Magnetic Compass (optional) |
External Magnetic Compass (optional) |
External Magnetic Compass (optional) |
Dual Antenna GNSS |
Dual Antenna GNSS |
|
俯仰和滾轉精度 |
- |
0.02 degrees (RMS) |
0.02 degrees (RMS) |
0.02 degrees (RMS) |
0.02 degrees (RMS) |
|
航向精度 |
- |
- |
- |
0.05 degrees (RMS) |
0.05 degrees (RMS) |
|
位置精度 |
- |
- |
- |
40 cm (DGPS), 1 cm (RTK) |
40 cm (DGPS), 1 cm (RTK) |
|
波向精度 |
- |
- |
- |
- |
0.5 degrees (RMS) |
|
尺寸 (mm) |
245 x 140 x115 |
245 x 140 x115 |
245 x 140 x115 |
245 x 140 x 115 |
245 x 140 x 115 |
|
重量 (g) |
6570 |
6570 |
6570 |
6500 |
6500 |
|
應用 |
測深儀掃描系統、海底波浪補償 |
測深、海底槓桿轉動 |
海底水文學、潛水船定向補償 |
船舶航行、自主測量船、動態定位系統 |
波浪和海浪跟踪、洋流和潮汐分析 |
|
Model |
MRU-B1S |
MRU-B1.1S |
MRU-B2S |
MRU-PDS |
WS-PDS |
MRU範例
|
 |
船舶導航
MRU產品線可輕鬆與車載自動駕駛系統和控制器配對,具有兩種型號,廣泛用於船上導航系統。MRU(MRU-P)的專業版具有用於位置和速度計算的單個天線GNSS接收器。同樣,專業雙天線MRU-PD能夠計算精確的位置和速度以及航向,精度為0.05度(RMS),是在任何尺寸的海上平台上導航的理想解決方案。
|
|
 |
水文測深測量
水深測量或水文測量是用於海底地形的測量方法,幾十年來一直用於觀察海洋景觀和結構。Inertial Labs
MRU能夠與單束和多束迴聲測深儀(SBES或MBES)以及其他使用業界公認的語句格式(NMEA和TSS-1)的外部傳感器一起使用,將信息直接傳遞給內部運算法則。這使得MRU成為理想的解決方案,尤其是在用於水文和測深測量應用程序時。
|
|
 |
貨物轉運和裝載穩定(ROV)
在裝卸貨物和海事設備時,有效傳達運動和導航參數(位置,速度,升沈,喘振和搖擺)以進行適當的升沈補償是大多數船舶行業中必不可少的應用。無論系統是全自動的,還是取決於用戶的響應,Inertial
Labs與競爭對手相比,擁有可以輕鬆安裝的設備來替換陳舊的設備是Inertial Labs脫穎而出的地方。Inertial
Labs使用常用的界面和數據格式構建模塊化和自定義解決方案。
|
|
 |
研究船和浮標
研究船和浮標可能需要一次運行數周而不中斷數據流。Inertial
Labs利用內部數據記錄功能構建強大的IP67或海底封閉解決方案,以記錄數據以進行後處理或實時監控。可以設置默認解決方案,以將數據無線傳輸到附近的基站,研究團隊可以使用這些數據來解釋海洋狀況。
|
|
 |
直升機停機坪和海上鑽井監控
運動參考單元通常用於模塊化自帶船舶(MCV)和直升機停機坪監視(HMS);穩定平台並與其他多個響應系統進行通信,以了解如何補償船舶的起伏,喘振和搖擺。海上石油鑽井或海洋風電場行業是Inertial
Labs能夠提供解決海洋運動所需的傳感器解決方案的其他常見市場。
|
|
 |
自主船隻(AUV和USV)
自治已成為本世紀增長最快的行業。自主水下船隻(AUV)或無人水面載具(USV)可以用於軍事用途,以進行海洋掃雷,或用於商業用途,以進行水下掃描和測量。現在,檢查過程已經採用了自主方法以及氣候和環境市場,特別是當Inertial
Labs提供的導航解決方案的成本效益越來越高時。
|
|
 |
與ABB ACS880絞盤驅動器集成
慣性實驗室運動參考裝置現已與ABB ACS880絞盤驅動器完全集成,可用於海上AHC和牽引力補償。ABB
ACS880絞車驅動器和MRU通過以太網Modbus
TCP協議與用於故障安全系統的看門狗定時器進行通信。每個MRU最多可與兩個ACS880驅動器並行通信,以實現冗餘或作為主/從同步應用程序。 |
與MRU整合
|
慣性實驗室運動參考裝置經過設計,可與許多不同的解決方案兼容。對於水文或測深測量,集成支持單波束和多波束迴聲測深儀(SBES或MBES)。
另外,利用平台上已經可用的傳感器並與MRU產品線集成在一起,以提高性能和導航精度。支持的外部傳感器包括:空速,風速,外部陀螺羅盤,速度源(都卜勒速度記錄)和外部GNSS接收器(單天線或雙天線)。 |
 |
MRU支持軟體
MRU性能表現
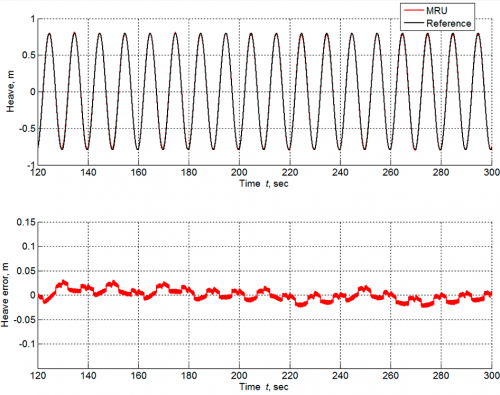
升沈精度(10秒和20秒波動週期)
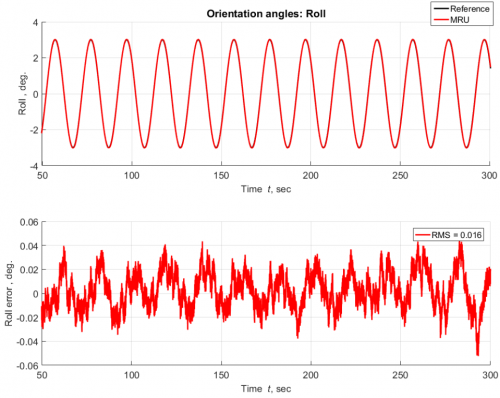
動態俯仰和橫滾精度(20秒波動週期)
升沈,俯仰和滾動動態測試
ABS設計評估證書
|
美國運輸局的代表評估了所有Inertial Labs
MRU產品的設計計劃和數據。該評估是無線電通信局代表外觀設計符合其《規則》適用部分的程度。該PDA用於將產品安裝在ABS級船隻,MODU或已存在或正在簽訂建造合同的設施中。
證書編號19-HS1851412-PDA
日期2019年5月10日 |
 |
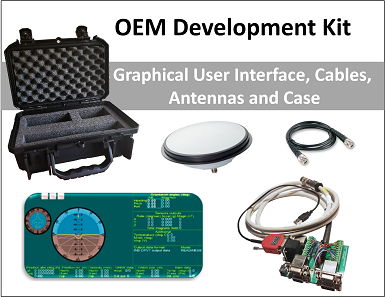
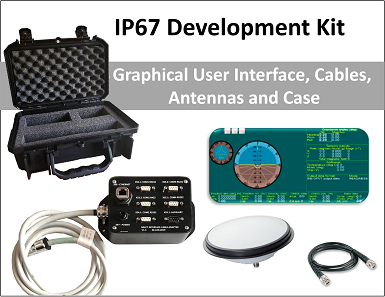
MRU開發套件
MRU開箱影片
商標法律聲明:所有產品名稱,徽標和品牌均為其各自所有者的財產。本文檔中使用的所有公司,產品和服務名稱僅用於標識目的。使用這些名稱,徽標和品牌並不表示認可。
Kongsberg / Seatex,船舶運動控制SMC,Teledyne
TSS,R2Sonic,WAASP,EdgeTech,NORBIT,IMAGENEX,HYPACK,QINSY,Novatel Inertial
Explorer是Kongsberg / Seatex,船舶運動控制SMC,Teledyne TSS,R2Sonic,WAASP,EdgeTech,
NORBIT,IMAGENEX,HYPACK,QINSY,Novatel Inertial Explorer
Inertial
Labs成立於2001年,是商業,工業,航空航天和國防應用中定位技術的領導者。Inertial
Labs的全球分銷商和代表網絡覆蓋6大洲的20多個國家/地區,提供緊湊,高性能和價格合理的微型方位傳感器,運動參考單位(MRU),姿態和航向參考系統(AHRS)和GPS輔助慣性導航系統(
INS)。應用範圍廣泛於陸地,空中和海洋;Inertial Labs涵蓋了慣性技術和解決方案的領域。聯繫我們以了解更多信息。
|