|











| |
單天線和雙天線GPS輔助慣性導航系統(INS)
|
 |
INS的發布始於2001年,當時Inertial Labs開始製造它的第一款基於MEMS的IP-67密封(後來發布了OEM導航系統版本),MIL-STD-810G認證,多個接口和COM端口單天線和雙天線GPS輔助慣性導航系統(INS)。每個INS都包含一個由Inertial
Labs開發的戰術或工業級慣性測量單元(IMU)以及來自Novatel, Hemisphere和Ublox等供應商的可靠的單或雙GNSS接收器。
INS-P是INS的專業模型,它使用嵌入式,高精度,陀螺儀補償的磁羅盤,即使在極端環境條件(溫度,振動,干擾,來自外部磁場)。
|
|
Inertial
Labs的技術工程師團隊可提供專業知識,以幫助用戶從可用模型中進行選擇和配置:INS-B,INS-P,INS-D和INS-DL。我們的支持團隊將幫助為所有應用程序基礎設置單位,以滿足啟用GNSS的環境和GNSS拒絕的環境。 |
可用型號
|
MODEL |
.png) |
.png) |
.png) |
.png) |
.png) |
.png) |
.png) |
.png) |
.png) |
|
CheetahNAV |
INS-U |
INS-B |
INS-P |
INS-BU |
INS-D |
INS-DL |
INS-DU |
INS-DM |
|
單或雙天線 |
單天線 |
單天線 |
單天線 |
單天線 |
雙天線 |
雙天線 |
雙天線 |
雙天線 |
|
Tactical Navigation System |
GPS-Aided INS with Air Data
Computer |
Basic Single GNSS Antenna Inertial
Navigation System |
Professional Single GNSS Antenna |
Single Antenna u-blox GNSS Inertial
Navigation System |
Dual GNSS Antenna Inertial
Navigation System |
Low Cost Dual GNSS Antenna Inertial
Navigation System |
Dual Antenna u-blox GNSS Inertial
Navigation System |
Dual GNSS Antenna Inertial
Navigation System |
|
航向精度 |
3 MIL (INS-B); 1 MIL (INS-D) |
0.6° static / 0.3° dynamic |
1° static / 0.1° dynamic |
0.4° static / 0.1° dynamic |
0.6° static / 0.3° dynamic |
0.8° (2m baseline) / 0.15° (1m baseline) |
0.2° (2m baseline) / 0.4° (1m baseline) |
0.2° (2m baseline) / 0.4° (1m baseline) |
0.08° |
|
位置精度 |
1cm (RTK), 2.5cm (PPP), 60cm (SBAS) |
1cm (RTK) |
1cm (RTK), 2.5cm (PPP), 60cm (SBAS) |
1cm (RTK), 2.5cm (PPP), 60cm (SBAS) |
0.5cm (PPK), 1cm (RTK), 60cm (SBAS) |
1cm (RTK), 2.5cm (PPP), 60cm (SBAS) |
1cm (RTK), 60cm (SBAS) |
0.5cm (PPK), 1cm (RTK), 60cm (SBAS) |
1cm (RTK), 40cm (DGPS) |
|
俯仰和滾轉精度 |
0.5 MIL |
0.05° dynamic, 0.08° static |
0.03° dynamic, 0.05° static |
0.03° dynamic, 0.05° static |
0.05° dynamic, 0.08° static |
0.03° dynamic, 0.05° static |
0.04° dynamic, 0.08° static |
0.05° dynamic, 0.08° static |
0.01° Dynamic |
|
衛星導航系統 |
BDS, GAL, GLO, GPS, QZSS, IRNSS (NavIC) |
BDS, GAL, GLO, GPS, QZSS |
BDS, GAL, GLO, GPS, QZSS |
BDS, GAL, GLO, GPS, QZSS |
BDS, GAL, GLO, GPS, QZSS |
BDS, GAL, GLO, GPS, QZSS |
BDS, GAL, GLO, GPS, QZSS |
BDS, GAL, GLO, GPS, QZSS |
BDS, GAL, GLO, GPS, QZSS |
|
座標修正 |
DGPS, PPK, PPP, RTK, SBAS |
DGPS, RTK, SBAS |
DGPS, PPK, PPP, RTK, SBAS |
DGPS, PPK, PPP, RTK, SBAS |
PPK, RTK, SBAS |
DGPS, PPK, PPP, RTK, SBAS |
PPK, RTK, SBAS |
PPK, RTK, SBAS |
DGPS, PPK, RTK |
|
慣性測量單元(IMU)類型 |
MEMS, Tactical-grade, FOG IMU Optional |
MEMS |
MEMS, Tactical-grade |
MEMS, Tactical-grade |
MEMS, Industrial-grade |
MEMS, Tactical-grade |
MEMS, Industrial-grade |
MEMS, Industrial-grade |
HG4930, IMU-NAV, IMU-P, Kernel IMU |
|
磁力計 |
External Magnetic Compass (optional) |
Embedded Mini-Fluxgate Magnetometer |
External Magnetic Compass (optional) |
Embedded Fluxgate Magnetic Compass |
Embedded Mini-Fluxgate Magnetometer |
External Magnetic Compass (optional) |
External Magnetic Compass (optional) |
Embedded Fluxgate Magnetic Compass |
Embedded or External Magnetic Compass |
|
其餘特性 |
Battle management system integration, Freeform messaging Anti
GNSS spoofing and jamming, Additional displays |
Static & Dynamic Pressure, Airspeed, Mach Number, True Angle of
Attack (ADC) |
Tactical Grade IMU, Advanced, extendable, embedded Kalman Filter
with sensor fusion algorithms |
All INS-B features + Fluxgate Gyro-Compensated Compass
(Magnetometer) – high performance in longterm GPS-Denied
environment |
Affordable price,
u-blox all-constellation GNSS, RTK |
All INS-B features + high-precision dual GNSS Heading (HDT) |
Affordable price, Industrial Grade IMU |
Affordable price,
u-blox all-constellation GNSS, RTK |
MIL-STD-1275, ADC, Encoder, Datalogger, Variable PPS |
|
尺寸 (mm) |
MDU: 322 x 233 x 50
DDU: 128 x 100 x 34
INS: 120 x 50 x 53 |
82 x 40 x 26 |
120 x 50 x 53 |
120 x 50 x 53 |
120 x 50 x 53 |
120 x 50 x 53 |
120 x 50 x 53 |
120 x 50 x 53 |
49 x 61 x 141 |
|
重量 (g) |
MDU: 4050
DDU: 650
INS-B: 220
INS-D: 320
|
200 |
220 |
280 |
320 |
320 |
320 |
320 |
1060 - 1300 |
|
應用 |
啟用 GNSS 和禁用 GNSS 的環境中的陸地車輛導航 |
長期 GNSS禁用下的固定翼無人機飛行控制和導航 |
無人駕駛汽車、陸地車輛導航、輕型無人搬運車、後處理圖像 |
擴展的GNSS禁用導航、無人機、尋北與守北 |
低成本精緻農業、低成本陸地車輛導航 |
重型車輛引導、陸地車輛導航、定翼機導航 |
天線指向、低成本定位和速度、工業導航 |
低成本 GNSS 禁用導航、低成本測量和掃描系統 |
無人地面載具、陸地車輛、定翼無人機、直升機擴展
GNSS禁用導航 |
|
Model |
CheetahNAV |
INS-U |
INS-B |
INS-P |
INS-BU |
INS-D |
INS-DL |
INS-DU |
INS-DM |
|
MODEL |
.png) |
.png) |
.png) |
.png) |
.png) |
.png) |
.png) |
.png) |
|
INS-B-OEM |
INS-P-OEM |
INS-U-OEM |
INS-BU-OEM |
INS-D-OEM |
INS-DL-OEM |
INS-DU-OEM |
INS-DH-OEM |
|
單天線 |
單天線 |
單天線 |
單天線 |
雙天線 |
雙天線 |
雙天線 |
雙天線 |
|
Basic Single GNSS Antenna OEM INS |
Professional Single GNSS Antenna OEM
INS |
GPS-Aided OEM INS with Air Data
Computer |
Single Antenna u-blox GNSS OEM INS |
Dual GNSS Antenna OEM INS |
Low Cost Dual GNSS Antenna OEM INS |
Dual Antenna u-blox GNSS OEM INS |
Dual GNSS Antenna OEM INS with
Honeywell HG4930 IMU |
|
航向精度 |
1° static / 0.1° dynamic / 0.03° (PPK) |
0.4° static / 0.1° dynamic / 0.03° (PPK) |
0.6° static / 0.3° dynamic |
0.6° static / 0.3° dynamic / 0.1° (PPK) |
0.08° (2m baseline) / 0.03° (PPK) |
0.2° (2m baseline) / 0.1° (PPK) |
0.2° (2m baseline) / 0.1° (PPK) |
0.05° (2m baseline) / 0.015° (PPK) |
|
位置精度 |
1cm (RTK), 2.5cm (PPP), 60cm (SBAS) |
0.5cm (PPK), 1cm (RTK), 60cm (SBAS) |
1cm (RTK) |
1cm (RTK) |
0.5cm (PPK), 1cm (RTK), 60cm (SBAS) |
0.5cm (PPK), 1cm (RTK), 60cm (SBAS) |
0.5cm (PPK), 1cm (RTK), 60cm (SBAS) |
0.5cm (PPK), 1cm (RTK), 60cm (SBAS) |
|
俯仰和滾轉精度 |
0.05° static / 0.03° dynamic / 0.006° (PPK) |
0.05° static / 0.03° dynamic / 0.006° (PPK) |
0.08° static / 0.05° dynamic |
0.08° static / 0.05° dynamic |
0.05° static / 0.03° dynamic / 0.006° (PPK) |
0.08° static / 0.04° dynamic / 0.01° (PPK) |
0.08° static / 0.05° dynamic / 0.03° (PPK) |
0.02° static / 0.01° dynamic / 0.002° (PPK) |
|
衛星導航系統 |
BDS, GAL, GLO, GPS, QZSS |
BDS, GAL, GPS, GLO, NAVIC, QZSS |
BDS, GAL, GLO, GPS, QZSS |
BDS, GAL, GLO, GPS, QZSS |
BDS, GAL, GLO, GPS, QZSS |
BDS, GAL, GLO, GPS, QZSS |
BDS, GAL, GLO, GPS, QZSS |
BDS, GAL, GLO, GPS, NavIC (IRNSS), QZSS |
|
座標修正 |
DGPS, PPK, PPP, RTK, SBAS |
DGPS, PPK, PPP, RTK, SBAS |
RTK |
RTK |
DGPS, PPK, PPP, RTK, SBAS |
PPK, RTK, SBAS |
PPK, PPP, RTK, SBAS |
PPK, PPP, RTK, SBAS |
|
慣性測量單元(IMU)類型 |
MEMS, Tactical-grade |
MEMS, Tactical-grade |
MEMS |
MEMS |
MEMS, Tactical-grade |
MEMS, Industrial-grade |
MEMS, Industrial-grade |
MEMS, Tactical-grade |
|
磁力計 |
External Magnetic Compass (optional) |
Embedded Fluxgate Magnetic Compass |
Embedded Mini-Fluxgate Magnetometers |
Embedded Mini-Fluxgate Magnetometers |
External Magnetic Compass (optional) |
External Magnetic Compass (optional) |
Internal Mini-FG Magnetic Compass |
External Magnetic Compass (optional) |
|
尺寸 (mm) |
85.5 x 47.7 x 39.4 |
85.5 x 47.7 x 46.9 |
65.0 x 37.2 x 19.9 |
85.5 x 47.7 x 39.3 |
85.5 x 47.7 x 40.2 |
85.5 x 47.7 x 40.0 |
85.5 x 47.7 x 39.3 |
85.5 x 67.5 x 52.0 |
|
重量 (g) |
174 |
174 |
100 |
174 |
184 |
184 |
174 |
280 |
|
應用 |
遙感; 實時無人機掃描;航測;集成激光雷達有效載荷 |
掃描和測量、集成有效載荷、固定翼航海 |
多旋翼、固定翼無人機飛行控制與導航 |
遙感、實時無人機掃描、航測、集成LiDAR負載 |
綜合陸地車輛導航、定翼機導航、綜合瞄準 |
低成本瞄準、精緻農業、工業航向穩定 |
低成本綜合陸地車輛導航、低成本瞄準 |
飛行控制、遙感、攝影測量 |
|
Model |
INS-B-OEM |
INS-P-OEM |
INS-U-OEM |
INS-BU-OEM |
INS-D-OEM |
INS-DL-OEM |
INS-DU-OEM |
INS-DH-OEM |
慣性導航系統的範例
|
 |
LiDAR遙感
LiDAR有時稱為3D激光掃描儀,它是一種測量方法,它通過用脈衝激光照射目標並用傳感器測量反射脈衝來測量到目標的距離。它具有地面,空中和移動應用程序。某些3D
LiDAR型號每秒能夠產生多達700,000個數據點。市場上有許多出色的生產商,例如Quanergy®(2)和Velodyne®。 |
|
|
 |
|
|
|
|
 |
掃描和映射
也許區域映射仍然是遙感的最大領域。通過分析地圖和3D模型了解現實世界,企業可以做出更快,更明智的決策,從而提高效率,利潤,更重要的是提高安全性。陸地車輛或無人飛行器(UAV)很少能被使用。 |
|
|
|
|
|
|
|
 |
無人機(UAV)
對於自動駕駛供應商而言,災難響應和緩解是一個日益成功的市場。INS已在啟用GPS或拒絕GPS的環境中與無人飛行器一致使用。無論是撲滅森林大火還是在緊急情況下識別人員並作出反應,Veronte
Autopilot(集成式Inertial Labs INS-P解決方案)都可以處理長時間任務,同時在GNSS拒絕的環境中攜帶大型有效載荷。 |
|
|
|
|
|
|
|
 |
自主車輛導航
慣性導航系統是市場上最堅固的導航傳感器。可以將INS用作獨立的導航傳感器,也可以輕鬆地將其與INS適應的其他傳感器集成在一起,例如:LiDAR,多普勒雷達,立體聲攝像頭,迴聲傳感器等等。這些有用的集成為即使是最難導航的城市環境也提供了可靠的解決方案。 |
|
|
|
|
 |
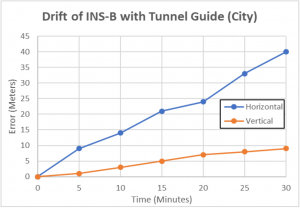
無人地面車輛(UGV)的無GPS信號導航
Inertial Labs最近發布了一種改進的導航算法,該算法提高了GNSS拒絕環境中地面車輛的導航精度。該“隧道指南”功能已通過試驗和測試證明,在GNSS拒絕的環境中,其位置精度相對於行進距離(DT)為0.2%。數據還支持通過從其他車載傳感器(如里程表,風速傳感器或風速傳感器)注入輔助信息,慣性導航系統可產生比DT低0.05%的位置精度。 |
|
|
|
|
|
|
|
 |
自主地面車輛(AGV)
精密農業是自動地面車輛興起的行業,是本世紀最常使用的自治案例之一。最新報告顯示,到2025年,精準農業預計將發展成為全球434億美元的產業。對於直到1990年代才開始受到關注的行業,這是一個令人印象深刻的市場。INS-DL和INS-D因其出色的導航性能而在工業和軍事領域的AGV上廣受歡迎。 |
|
|
|
|
 |
遙控車(ROV)
ROV是INS的理想平台。這些平台已經利用了Inertial Labs INS的基於MEMS的高級導航功能。直到最近,該市場僅可用於基於光纖陀螺儀(FOG)的慣性傳感器。但是,通過在MEMS敏感元件之間採用改進的校準程序和用於精密加工的方法,Inertial
Labs INS現在具有在性能和可靠性上與FOG單元競爭的能力。 |
支持的硬體整合
慣性實驗室慣性導航系統經過精心設計,可與許多不同的解決方案兼容。諸如Pixhawk或Embention的Veronte(由Northwest
UAV發行)之類的自動駕駛平台可為用戶提供精確的精度,而成本卻只是其一小部分,而且還增加了每個系統的附加功能。
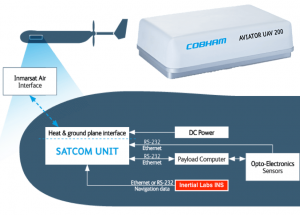
自定義輸出格式支持用戶直接與Cobham Aviator UAV 200通信的能力。此外,INS可以與LiDAR掃描儀,聲納和光學相機配合使用。
慣性導航系統支持的軟體
INS的性能表現
沒有GPS時的導航(隧道指南)性能
在我們的《隧道指南白皮書》中閱讀沒有GPS的導航性能測試的結果。
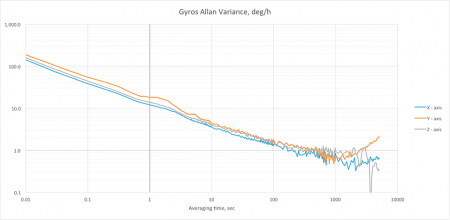
戰術IMU陀螺儀偏差Allan
Variance測試
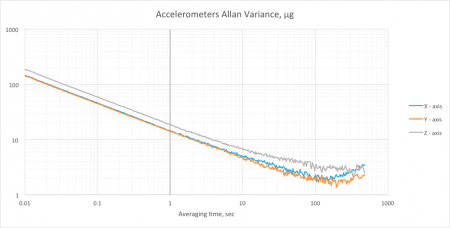
戰術IMU加速度計偏差Allan
Variance測試
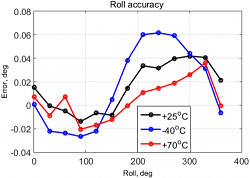
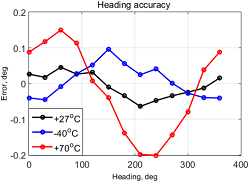
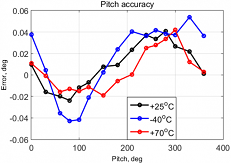
INS航向,俯仰和橫滾精度(INS-B / P / D)
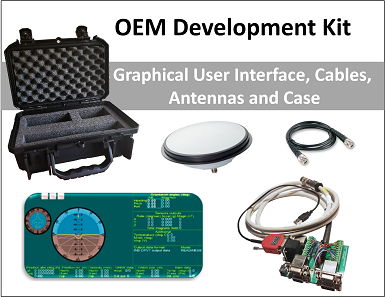
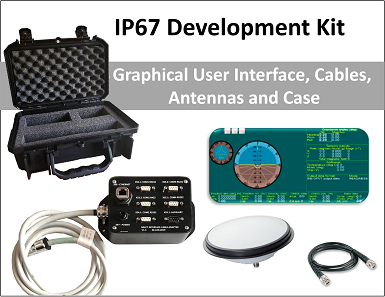
INS開發套件
INS開箱影片
商標法律聲明:所有產品名稱,徽標和品牌均為其各自所有者的財產。本文檔中使用的所有公司,產品和服務名稱僅用於標識目的。使用這些名稱,徽標和品牌並不表示認可。
Kongsberg / Seatex,船舶運動控制SMC,Teledyne
TSS,R2Sonic,WAASP,EdgeTech,NORBIT,IMAGENEX,HYPACK,QINSY,Novatel Inertial
Explorer是Kongsberg / Seatex,船舶運動控制SMC,Teledyne TSS,R2Sonic,WAASP,EdgeTech,
NORBIT,IMAGENEX,HYPACK,QINSY,Novatel Inertial Explorer
Inertial
Labs成立於2001年,是商業,工業,航空航天和國防應用中定位技術的領導者。Inertial
Labs的全球分銷商和代表網絡覆蓋6大洲的20多個國家/地區,提供緊湊,高性能和價格合理的微型方位傳感器,運動參考單位(MRU),姿態和航向參考系統(AHRS)和GPS輔助慣性導航系統(
INS)。應用範圍廣泛於陸地,空中和海洋;Inertial Labs涵蓋了慣性技術和解決方案的領域。聯繫我們以了解更多信息。
|