|











| |
|
 |
慣性實驗室慣性測量單元(IMU)每個均包含3個高度精確的高級MEMS陀螺儀和3個高性能加速度計。為了使最終用戶獲得最大的可用性,IMU-P和內核都在其工作溫度範圍內進行了溫度校準。這也確保了戰術等級的性能,無論使用何種環境。
對於以前可能僅使用光纖陀螺儀(FOG's)作為主要解決方案的系統,這些IMU是無成本效益的解決方案(無ITAR)。通過使用廣泛的校準方法並開發強大的卡爾曼濾波器,Inertial
Labs開發了IMU-P和Kernel產品線,以與市場上的許多FOG裝置的性能競爭。 |
|
Inertial
Labs的技術工程師團隊可提供專業知識,以幫助用戶從可用型號中進行選擇和配置:IMU-P工業版,IMU-P戰術(穩定版),IMU-P戰術(標準版)和Kernel-100。請與我們的支持團隊聯繫,以幫助您整合部門或訪問我們的知識庫以查看常見問題的答案。 |
可用的IMU型號
Inertial Labs
微機電傳感器(陀螺儀)的慣性測量單元
|
MODEL |
 |
 |
 |
.png) |
.png) |
 |
 |
 |
|
IMU-NAV-100 Grade A |
IMU-NAV-100 Grade S |
IMU-P Tactical-A |
IMU-P Tactical-S |
IMU-P Industrial |
IMU-Kernel-100 |
IMU-Kernel-110,
IMU-Kernel-120 |
IMU-Kernel-210,
IMU-Kernel-220 |
|
High Precision MEMS Inertial
Measurement Unit |
High Precision MEMS Inertial
Measurement Unit |
Professional Inertial Measurement Unit |
Professional Inertial Measurement Unit |
Professional Inertial Measurement Unit |
Inertial Measurement Unit |
Inertial Measurement Unit |
Inertial Measurement Unit |
|
穩定運作中的陀螺儀偏差 (RMS) |
0.5º/hour |
1º/hour |
1º/hour |
2º/hour |
3º/hour |
2º/hour |
2º/hour |
1º/hour |
|
陀螺儀雜訊 (ARW) |
0.1º/√hour |
0.04º/√hour |
0.2º/√hour |
0.08º/√hour |
0.3º/√hour |
0.38º/√hour |
0.3º/√hour |
0.2º/√hour |
|
穩定運作中的加速規偏差 |
0.003 mg (RMS, 8g) |
0.003 mg (RMS, 8g) |
0.005 mg (RMS,8g) |
0.005 mg (RMS,8g) |
0.01 mg (RMS, 8g) |
0.01 mg (RMS, 8g) |
0.01 mg (RMS, 8g) |
0.005 mg (RMS,8g) |
|
俯仰和滾轉精度 |
0.03º (Static, RMS) |
0.03º (Static, RMS) |
0.05º (Static,RMS) |
0.05º (Static,RMS) |
0.05º (Static,RMS) |
0.05º (Static,RMS) |
0.05º (Static,RMS) |
0.05º (Static,RMS) |
|
Accel SF Accuracy (over temp. range) |
150 ppm |
150 ppm |
150 ppm |
150 ppm |
500 ppm |
500 ppm |
500 ppm |
150 ppm |
|
尺寸 (mm) |
59.2 x 48.2 x 48.2 |
59.2 x 48.2 x 48.2 |
39 x 45 x 22 |
39 x 45 x 22 |
39 x 45 x 22 |
28.5 x 19.5 x 8.5 |
28.38 x 19.5 x 10.5 |
28.38 x 19.5 x 10.5 |
|
重量 (g) |
155 |
155 |
70 |
70 |
70 |
7 |
10 |
17 |
|
應用 |
路上車輛導航、運動分析、無人機及水中無人機導航 |
天線和視線穩定系統、運動控制傳感器 |
光電元件 (EOC/IR)、方向控制、平台穩定 |
防傾倒系統、萬象儀(雲台)、運動控制傳感器 |
3D 光學圖像穩定系統、 計算機指向設備 |
自動駕駛系統、視距穩定、微型無人機系統 |
自動駕駛系統、視距穩定、微型無人機系統 |
自動駕駛系統、制導和導航、視距穩定、微型無人機系統 |
|
Model |
IMU-NAV-100 Grade A |
IMU-NAV-100 Grade S |
IMU-P Tactical-A |
IMU-P Tactical-S |
IMU-P Industrial |
IMU-Kernel-100 |
IMU-Kernel-110,
IMU-Kernel-120 |
IMU-Kernel-210,
IMU-Kernel-220 |
Memsense
微機電傳感器(陀螺儀)的慣性測量單元
|
MODEL |
 |
 |
 |
|
MS-IMU3025 |
MS-IMU3030 |
MS-IMU3050 |
|
Miniature High Performance IMU |
Miniature High Performance IMU |
Industry’s Highest MEMS IMU Performance |
|
非穩定速度偏差 |
XY 2.6 µg; Z 6.7 µg |
2.9 µg |
2.6 µg |
|
非穩定陀螺儀偏差 |
XY 0.6°/hr; Z 0.8°/hr |
0.55°/hr |
0.3°/hr |
|
隨機漫步 速度 |
0.008 m/s/√h |
0.005 m/s/√h |
0.006 m/s/√h |
|
隨機漫步 角度 |
0.15°/√h |
0.11°/√h |
0.065°/√h |
|
輸出採樣頻率 |
1000 Hz |
800 Hz |
800 Hz |
|
尺寸 (mm) |
27.94 x 27.94 x 11.51 |
27.94 x 27.94 x 11.33 |
40.64 x 45.72 x 24.99 |
|
重量 (g) |
18 |
25 |
79 |
|
應用 |
導航系統、管道檢查、指向、平台穩定、無人機系統導航和控制、測量、機器人工學、 相機穩定 |
導航系統、管道檢查、指向、平台穩定、無人機系統導航和控制、測量、機器人工學、 相機穩定 |
導航系統、管道檢查、指向、平台穩定、無人機系統導航和控制、測量、機器人工學、 相機穩定 |
|
Model |
MS-IMU3025 |
MS-IMU3030 |
MS-IMU3050 |
光學陀螺儀的慣性測量單元
|
MODEL |
 |
 |
.png) |
|
IMU-FI-200C |
IMU-FI-250C
COMING SOON IN 2024 |
IMU-FI-300C
COMING SOON IN 2024 |
|
Fiber Optic Gyroscopes (FOG) and MEMS accelerometers based Inertial
Measurement Units (IMU) |
|
陀螺儀偏置重複精度 |
0.5º/hour (over temp. range) |
1º/hour (over temp. range) |
0.1º/hour (over temp. range) |
|
陀螺儀雜訊 (ARW) |
0.025º/√hour (typical) |
0.03º/√hour (typical) |
0.01º/√hour (typical) |
|
穩定運作中的加速規偏差 |
0.015 mg (RMS) |
0.025 mg (RMS) |
0.005 mg (RMS) |
|
加速偏差重複精度 |
1.2 mg (over temp. range) |
1.5 mg (over temp. range) |
0.8 mg (over temp. range) |
|
加速度 SF 精度 |
300 ppm (over temp. range) |
400 ppm (over temp. range) |
100 ppm (over temp. range) |
|
尺寸 (mm) |
D88.9 x H84.5 |
D88.9 x H84.5 |
D88.9 x H84.5 |
|
重量 (g) |
790 |
790 |
790 |
|
應用 |
戰術導航、中等精度陀螺儀 |
可接受中期GNSS信號關閉環境中的制導及導航 |
航海羅盤陀螺儀、長期GNSS信號關閉環境中的制導及導航 |
|
Model |
IMU-FI-200C |
IMU-FI-250C
COMING SOON IN 2024 |
IMU-FI-300C
COMING SOON IN 2024 |
IMU範例
慣性實驗室慣性測量單元通常用於以下應用
|
 |
天線和視線穩定
穩定由風,運動或平台上的摩擦引起的不必要的天線移動。此外,還可以利用IMU-P輕鬆集成到天線跟踪系統中。無論您是從衛星進行跟踪還是從RF傳輸進行跟踪,IMU-P都可以輕鬆地安裝到任何表面,並生成視線(LOS)和視線之外(BLOS)天線傳輸系統常用的自定義數據輸出格式。
|
|
 |
運動控制傳感器(MCS)和雲台執行器
IMU-P是靜態和動態應用中的理想運動控制解決方案。在航空航天工業中,IMU-P的戰術版本非常適合於萬向輪式發動機在不同方向上推力推力。此外,它通常用於移動高架工作平台(MEWP)上的倉庫和建築工地,以計算和抵消不必要或不安全的傾斜。
|
|
 |
FOG裝置的低成本更換
更換現有傳感器並不像購買新傳感器並將其插入現有硬件那樣容易。公司在尋求替代解決方案時還必須考慮許多其他因素,而且它們通常既昂貴又耗時。Inertial
Labs希望為尋求停產傳感器替代解決方案的客戶減少研發和編程時間。我們通過創建自定義的貼合解決方案來滿足陳舊的FOG設備的低成本替代方案,以滿足最終用戶在性能和功能上的需求。
|
|
 |
電光組件(EOC和IR)
輕鬆與光電系統集成,並用於對象識別,檢測和端到端響應系統。Inertial
Labs通常用於軍事和安全部門,已與Openworks
Engineering等許多公司合作開發用於目標檢測和響應的定制解決方案。計算機視覺系統利用來自Inertial Labs
IMU-P的數據流來正確識別目標位置,距離和仰角。響應系統利用來自IMU-P的定向數據,然後採取必要的行動來保護用戶資產。
|
|
 |
旅客列車監控和軌道檢查系統
符合EN 50121-3-2和EN 61000-6-1 / 3的Inertial
Labs產品,尤其是戰術級IMU-P,是旅客列車加速度監控系統和軌道檢查有效載荷的理想解決方案。融合了光學識別硬件和軟件的定向數據可用於正確識別並警告操作員有關乘客安全的潛在威脅。無論是監視火車的速度和加速度,還是幫助進行軌道檢查以識別裂紋的蔓延,IMU-P都能確保安全,並且是所有檢查平台的關鍵要素。 |
IMU支持的軟體
Inertial
Labs提供了驅動程序和必要的工具,可輕鬆與常用平台(例如ROS,LabVIEW和Waypoint產品)集成。另外,利用軟件開發套件為您的應用程序創建自定義解決方案。
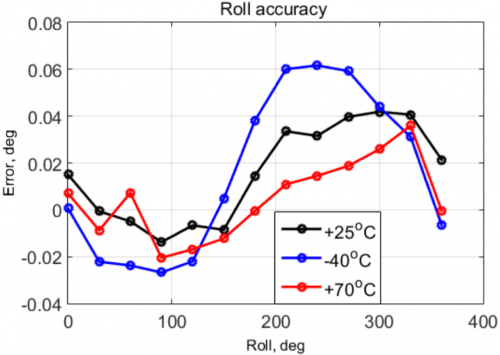
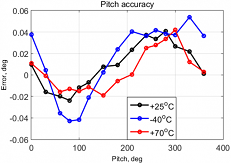
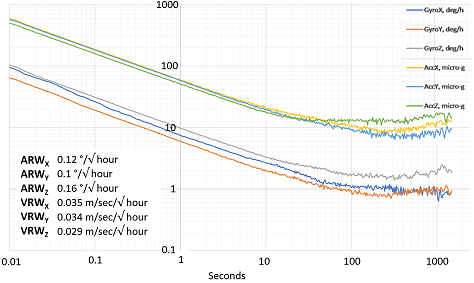
IMU的性能特徵
戰術IMU-P
S陀螺儀偏差艾倫方差測試
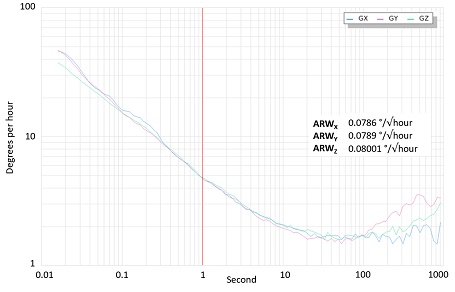
戰術IMU-P
A噪聲(ARW / VRW,15g)艾倫方差測試
IMU-P俯仰和橫滾精度(戰術)
IMU-P開發套件

IMU-P拆箱
商標法律聲明:所有產品名稱,徽標和品牌均為其各自所有者的財產。本文檔中使用的所有公司,產品和服務名稱僅用於標識目的。使用這些名稱,徽標和品牌並不表示認可。
Kongsberg / Seatex,船舶運動控制SMC,Teledyne
TSS,R2Sonic,WAASP,EdgeTech,NORBIT,IMAGENEX,HYPACK,QINSY,Novatel Inertial
Explorer是Kongsberg / Seatex,船舶運動控制SMC,Teledyne TSS,R2Sonic,WAASP,EdgeTech,
NORBIT,IMAGENEX,HYPACK,QINSY,Novatel Inertial Explorer
Inertial
Labs成立於2001年,是商業,工業,航空航天和國防應用中定位技術的領導者。Inertial
Labs的全球分銷商和代表網絡覆蓋6大洲的20多個國家/地區,提供緊湊,高性能和價格合理的微型方位傳感器,運動參考單位(MRU),姿態和航向參考系統(AHRS)和GPS輔助慣性導航系統(
INS)。應用範圍廣泛於陸地,空中和海洋;Inertial Labs涵蓋了慣性技術和解決方案的領域。聯繫我們以了解更多信息。
|